0101. Физические величины, единицы измерения и размерности
Предмет физики: расстояния от очень маленького до очень большого отличаются в 1040...1050 раз.
Основные единицы измерения системы SI (кг, м и с) называются размерностями.
Через эти три размерности можно выразить большнство единиц измерения в механике.
Пример: Преобразование единиц измерения (световой год - в метры и скорость из m/s - в km/h).
Загрузить расчет.
0102. Физические измерения и погрешности
Физический эксперимент не имеет смысла, если неизвестны погрешности измерений.
В качестве примера измерений автор осуществляет градуировку аналогового оптического датчика расстояния.
Расстояние до отражающей поврхности измеряется рулеткой, а показания датчика - цифровым вольтметром.
Второй пример - запись координаты робота бортовым УЗ-датчиком расстояния.
Обсуждается замедление робота в середине траектории: влияние погрешности измерения или наезд на препятствие?
Практикум 1: Градуировка датчика расстояния. Данные: расстояние, m - показания датчика, mV.
Практикум 2: Движение робота x(t) Данные: время ms - координата, сm.
Загрузить данные и расчеты (zip)
0103. Анализ размерности
Метод анализа размерности состоит в проверке совпадения размерности правой и левой частей предполагаемой формулы и позволяет получить ее с точностью до множителя
В качестве примера приводится вывод зависимости времени падения объекта (под действием гравитации) от высоты, с которой он падает. Для отношения времен (для двух разных высот падения) получается точная формула.
0104. Анализ размерности. Демонстрация: измерение времени свободного падения
Автор экспериментально проверяет формулу зависимости времени падения от высоты, полученную из соображений анализа размерности.
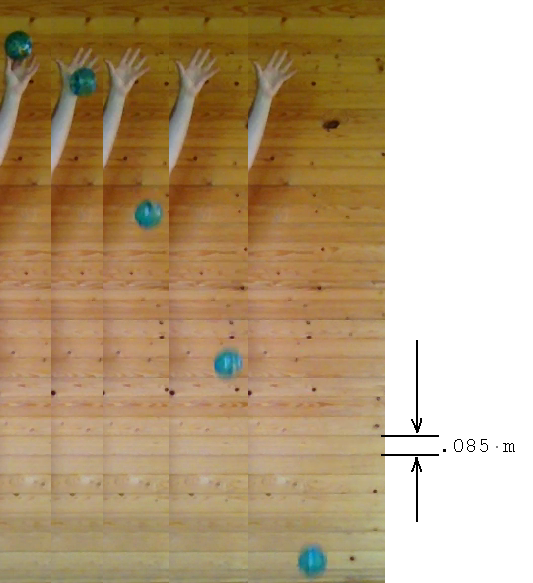
Он бросает шарик вниз и фиксирует падение на видеокамеру планшета. Анализируя кадры (картинка здесь), можно оценить высоту и время падения шарика.
Расчеты отношений пар времен падения демонстрируют работу полученной из анализа размерности формулы (с учетом погрешности) и позволяют вычислить неизвестный коэффициент, входящий в формулу.
Практикум:Измерение времени свободного падения в зависимости от пройденного расстояния. Данные: номер кадра (частота кадров 30 s-1) - относительная координата (х 8.5 cm)
Загрузить данные и расчеты (zip)
0105. Оценка погрешности измерений
Какую роль играет точность в физике? Как можно повысить точность измерений? Автор измеряет расстояние тремя независимыми способами: рулеткой, ультразвуковым и оптическим датчиками, вычисляет среднее значение и анализирует ошибку среднего
После этого он возвращается к задаче градуировки оптического датчика расстояния и использует метод наименьших квадратов для того чтобы получить связь между показаниями датчика и искомым расстоянием s. Оказывается, что в определенном диапазоне расстояний можно установить линейную связь 1/s=Ax+b.
Без вывода приводятся оценки погрешности коэффициентов A и b.
Практикум:Метод наименьших квадратов. Данные: расстояние, m - показания датчика, mV.
Загрузить данные и расчеты (zip)
Глава 2. Кинематика: движение по прямой
0201. Скорость
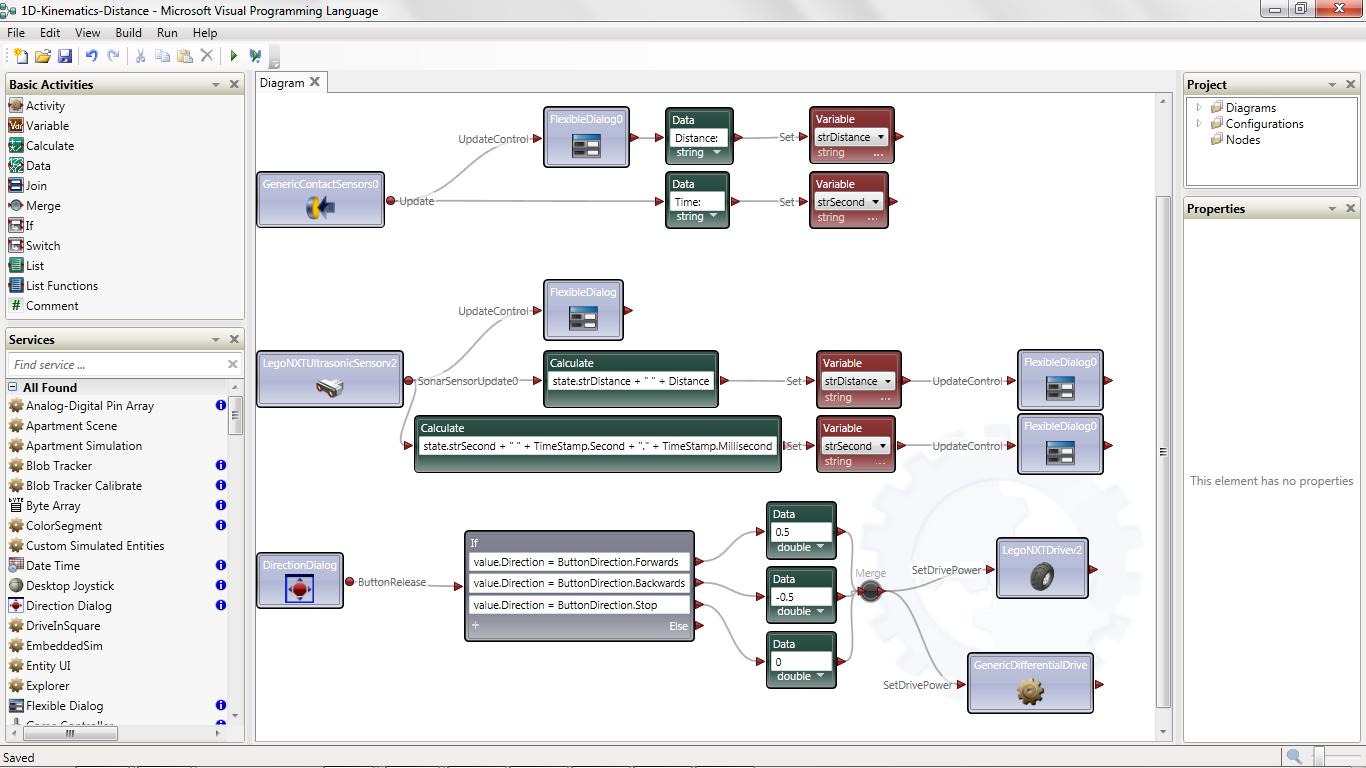
Демонстрация: робот начинает движение и, двигаясь по прямой вперед-назад, совершает несколько разворотов и возвращается на исходную позицию. В ходе движения текущая координата робота фиксируется бортовым сенсором расстояния.
В ролике приведена компьютерная модель движения (при помощи Microsoft Robotics Developer Studio), а реальная демонстрация приведена
здесь.
Автор отмечает наугад несколько точек (время t и координату x), характеризующих траекторию движения (для дальнейшего обсуждения). Начальная и конечная точки совпадают: x1=x5.
Средняя скорость - это расстояние, которое прошел робот за некоторое время t, отнесенное к этому времени. Автор обсуждает значение средней скорости на нескольких интервалах, делая акцент на его знаке (знак зависит от выбора направления оси х).
Мгновенная скорость - это предел отношения расстояния к промежутку времени (при стремлении этого промежутка к нулю), т.е. производная v=dx/dt.
Демонстрация: Движение робота (на видеоролике помечены точки x1...x5).
Приложение: Диаграмма управления роботом (программа Microsoft Robotics Developer Studio).
0202. Графики x(t), v(t)
По данным датчика расстояния, записанным в ходе предыдущей демонстрации, можно построить график зависимости координаты робота x от времени t.
Автор откладывает на графике точки (t1,x1)...(t5,x5) и оценивает по нему среднюю скорость на разных промежутках траектории (не отвлекаясь на анализ погрешностей, который отложен до следующей лекции).
На одних участках она положительна, а на других - отрицательна. Средняя скорость всего движения равна нулю, т.к. x1=x5.
Обсуждается различие между терминами "скорость" (velocity) и "модуль скорости" (speed).
Мгновенная скорость в каждый момент времени задается наклоном кривой x(t). Там, где график идет вверх - скорость положительна, где вниз - отрицательна, а в точках максимума и минимума она равна нулю.
Соответственно, по графику x(t) можно оценить зависимость v(t).
Практикум 1: Градуировка датчика расстояния. Данные в двух файлах: 1. время, с; 2. расстояние, сm.
Загрузить данные и расчеты (zip)
0203. Измерение скорости
Демонстрация: робот начинает движение и, быстро набрав скорость, двигается с постоянной скоростью по прямой. В определенный момент времени он разворачивается и начинает двигаться в обратном направлении, останавливаясь на прежнем месте.
Измерения координаты осуществляются бортовым датчиком расстояния с периодичностью 1 раз в секунду.
Автор рассчитывает среднюю скорость робота (отдельно для движения вперед и назад) и оценивает мгновенную скорость (в зависимости от времени).
В заключение производится оценка средней скорости по наклону графика x(t) методом наименьших квадратов.
Практикум: Измерение скорости робота. Данные: координата, сm (в одном файле, период между измерениями - 1s).
Загрузить данные и расчеты (zip)
0204. Ускорение
Ускорение - это скорость изменения скорости. Среднее ускорение равно отношению изменения скорости к промежутку времени.
Мгновенное ускорение равно производной скорости по времени (и второй производной координаты по времени).
Ускорение может быть, как положительным, так и отрицательным или нулевым. Знак ускорения зависит от выбора направления координатной оси.
Автор оценивает ускорение по графику x(t) и указывает на то, что ускорение характеризует быстроту изменения его наклона.
0205. Пример уравнения движения
В качестве примера исследуется одномерное движение объекта с заданным уравнением движения x(t)=8-6t+t2.
Результат расуждений обобщается на произвольный случай равноускоренного движения по прямой.
Практикум: Уравнение движения x(t)=8-6t+t2.
Загрузить расчет (zip)
0206. Измерение ускорения
Демонстрация: робот движется равноукоренно (мощность вращения колес робота, согласно программе, нарастает линейно со временем).
Измерения координаты осуществляются бортовым датчиком расстояния с периодичностью 1 раз в секунду.
Автор по формулам, полученным на пошлом занятии, определяет среднее ускорение робота, а также качественно оценивает его мгновенное ускорение на всем промежутке движения.
Практикум: Измерение времени свободного падения в зависимости от пройденного расстояния. Данные: время и координата (в двух разных файлах)
Загрузить данные и расчеты (zip)
0207. Демонстрация: измерение ускорения свободного падения
Автор экспериментально измеряет значение ускорения свободного падения.
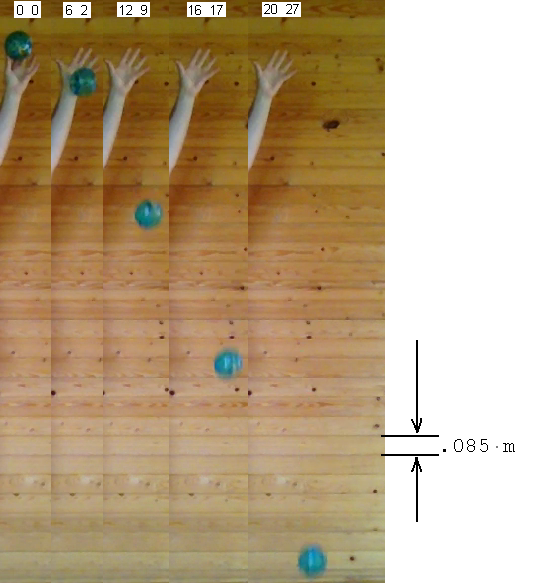
Он бросает шарик вниз и фиксирует падение на видеокамеру планшета. Анализируя кадры (картинка здесь: каждая метка - это номер кадра и "координата"), можно оценить высоту и время падения шарика.
Само падение длится 2/3 секунды, и по зависимости времени падения от пройденного растояния, рассчитывается значение ускорения шарика.
Практикум: 1. График уравнения движения в поле тяжести. 2. Измерение времени свободного падения в зависимости от пройденного расстояния. Данные: номер кадра (частота кадров 30 s-1) - относительная координата "в дощечках" (х 8.5 cm)
Загрузить данные и расчеты (zip)
Глава 3. Двумерное движение
Векторы
Баллистика
Задача об обезьяне
Движение по окружности
Для эффективной работы установите бесплатный редактор
Mathcad Express
(инструкция по установке
здесь).
{kind=link}
{kind=link}
{kind=link}